URP中基于Depth Texture的空间重建
Motivation
很多后处理效果在实现时,只能从深度纹理中获取深度信息,而无法获取场景中几何体的顶点数据,但其实现方式又需要利用世界空间/相机空间中的坐标。这种情况下,我们就需要从深度纹理中重建世界空间坐标。此外,也有一些其他的重建选项,例如重建世界空间中的法线,或者相机空间中的位置。
无论我们要重建哪种信息,出发点都是深度纹理,我们通过屏幕空间的UV,采样得到当前像素对应的深度值,并进行一些列的空间变换,最终获取所需的信息。
重建世界坐标
标准方法
重建世界坐标有一套标准的流程,Unity为我们封装了重建的过程,其使用方法可以参考Unity的这篇博客。在Unity所提供的函数中,逆向还原了渲染管线中空间变换的过程。我们先回顾一下整个过程:
- 在顶点着色器中,顶点从模型空间变换到齐次裁剪空间:$M_{\text{proj}} * M_{\text{view}} *P_{\text{world}} =P_{\text{clip}} $
- 接下来,Unity会为我们执行透视除法,转换到NDC空间:$P_{\text{clip}} / P_{\text{clip}}.w=P_{\text{NDC}}$
- NDC空间中的XY坐标的范围为$[-1, 1]$,
- NDC空间中的Z坐标的范围视API而定,但最终存储到深度纹理中的范围为$[0, 1]$
- 对于
SV_POSITION, Unity会将其XY坐标从$[-1, 1]$再次映射到到$[0,\text{Render Target Resolution}]$的范围上
所以,当我们在物体的片段着色器中重建世界空间坐标时,可以使用下面的数学表达式:
\(P_{\text{world}}=M^{-1}*P_{\text{ndc}} \\ P_{\text{world}}/= P_{\text{world}}.w\) 对应在Shader为:
1
2
3
4
5
6
7
8
float2 positionSS = input.positionHCS.xy / _ScreenParams.xy;
float depth = SampleSceneDepth(positionSS);
float3 positionNDC = float3(positionSS * 2 - 1, depth);
#if UNITY_UV_STARTS_AT_TOP
positionNDC.y = -positionNDC.y;
#endif
float4 positionWS = mul(UNITY_MATRIX_I_VP, float4(positionNDC, 1));
positionWS /= positionWS.w;
相机射线方法
URP在SSAO中提供了另一种实现方法,其思路为:求出该点相较于相机位置的偏移量,在应用到相机位置上即可。该方法中的重点在于,如何计算出这个偏移量。如下图所示,我们深度信息与相机的近裁截面,构建出两个相似三角形:
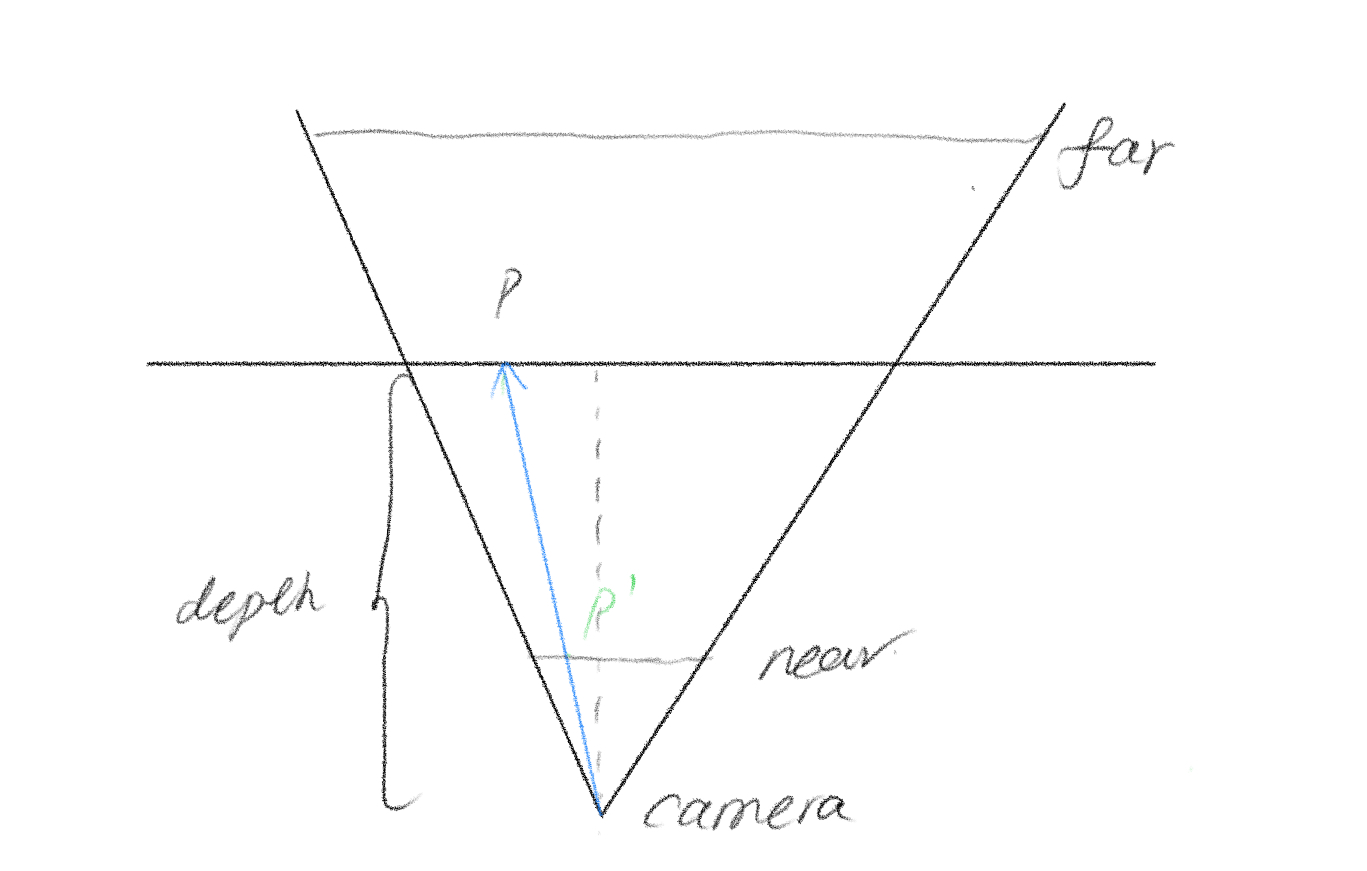
由相似三角形,可得$\vec{P}=\frac{depth}{near}\vec{P^`}$,所以问题变为了求P与相机构建的摄像与近平面的交点位置,而交点位置在近平面上的相对位置是已知的,就是当前像素的屏幕空间坐标。由此,我们只需要知道近平面其中一个顶点的世界坐标,以及近平面在世界空间中的宽高即可。
在实现时,我们创建一个Render Feature,向Shader中传递对应的数据。需要注意的是,我们需要计算的是某点相对于相机的偏移位置,在计算近平面的世界坐标时,我们需要移除视图矩阵中相机自身位移的影响:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
// calculate camera frustum properties
// -----------------------------------
CameraData cameraData = renderingData.cameraData;
Matrix4x4 proj = cameraData.GetProjectionMatrix();
Matrix4x4 viewNoTrans = cameraData.GetViewMatrix();
viewNoTrans.SetColumn(3, new Vector4(0, 0, 0, 1));
Matrix4x4 invViewProj = (proj * viewNoTrans).inverse;
Vector4 topLeftCorner = invViewProj.MultiplyPoint(new Vector3(-1, 1, -1));
Vector4 topRightCorner = invViewProj.MultiplyPoint(new Vector3( 1, 1, -1));
Vector4 bottomLeftCorner = invViewProj.MultiplyPoint(new Vector3(-1, -1, -1));
// pass to shader
mPassMaterial.SetVector(CameraTopLeftCornerID, topLeftCorner);
mPassMaterial.SetVector(CameraXExtentID, topRightCorner - topLeftCorner);
mPassMaterial.SetVector(CameraYExtentID, bottomLeftCorner - topLeftCorner);
在Shader中,我们利用以上信息还原出世界空间坐标:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
float3 ReconstructionPositionWS(float2 uv)
{
float rawDepth = SampleSceneDepth(uv);
float linearDepth = LinearEyeDepth(rawDepth, _ZBufferParams);
uv.y = 1.0 - uv.y;
float zScale = linearDepth * rcp(_ProjectionParams.y);
float3 positionVS = _CameraTopLeftCorner.xyz +
_CameraXExtent.xyz * uv.x +
_CameraYExtent.xyz * uv.y;
positionVS *= zScale;
return _WorldSpaceCameraPos + positionVS;
}