The Visibility Problem the Depth Buffer Algorithm and Depth Interpolation
当像素与三角形重叠时,我们将其视为与三角形表面上一点重叠。当然,一个像素可能会有多个点重叠,此时我们的解决办法是比较与像素重叠的每一个点的深度值,找出距离相机最近的点。这样,我们就可以引出depth buffer这个概念了。它是一个与frame buffer尺寸相同的二维浮点数数组,它用于在光栅化过程中记录物体的深度值。
Finding Z by Interpolation
depth buffer的定义和使用方法都比较好理解,所以我们现在的问题是如何计算深度值。我们首先再次明确一下深度值的含义。当一个像素与三角形重叠时,它会覆盖三角形上的一个微小表面,为了简化,我们将该微小表面视为单个点,我们的目标就是计算该点的Z坐标。
在投影阶段,我们将栅格空间空间中的投影点声明为一个三维点,其中Z坐标就是三角形顶点在相机空间中的Z坐标的负值,即:
\[P_{\text{raster}}.z=-P_{\text{camera}}.z\]既然已知了投影三角形的三个顶点的Z坐标,我们只需要根据重心坐标插值即可:
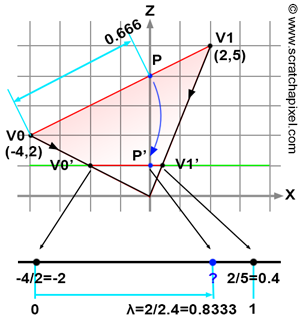
\[P.z = \lambda_0 \cdot V0.z + \lambda_1 \cdot V1.z + \lambda_2 \cdot V2.z.\]但实际上这种方法是错误的。通过重心坐标插值计算的前提是,对应的属性在三角形表面上是线性变化的,而当三角形经过透视除法被投影到canvas上,Z值就不再在2D的三角形表面上线性变化了。换种说法的话,透视投影保留了直线但不保留距离,三维空间中物体的距离比例无法在投影到2D平面时保留。如下图所示:
那我们应该如何计算深度值呢?答案是使用深度值的倒数进行插值,也就是:
\[\dfrac{1}{P.z} = \dfrac{1}{V0.z} \cdot \lambda_0 + \dfrac{1}{V1.z} \cdot \lambda_1 + \dfrac{1}{V2.z} \cdot \lambda_2.\] 本文由作者按照 CC BY 4.0 进行授权