Cascade Shadow Mapping
传统的shadow mapping技术存在一些缺点:
- shadow map始终围绕光源创建,而非相机看向的位置
- shadow map的正交投影矩阵与相机视锥体没有很好的契合
- 如果阴影渲染距离较大,则阴影会显得模糊
对此,级联阴影给出的解决方法是对于不同距离范围的物体,使用不同的shadow map,在片段着色器中,根据片段的深度值选择对应的shadow map进行采样。通过这样的做法,每个shadow map都能够对较小范围的区域进行采样,从而更好地匹配view space与纹理空间中的采样频率,降低shadow mapping的锯齿。
级联阴影的算法可以概括为如下步骤:
- 将视锥体划分为数个子视锥体
- 为每个子视锥体计算紧密贴合的正交矩阵
- 为每个子视锥体渲染平行光的shadow map
- 将所有的shadow map传递给片段着色器
- 根据片段的深度值,选择正确的shadow map进行采样
在级联阴影技术中,较为重要的是关于视锥体的划分。我们用PSSM(m, res)来表示我们的划分方案,其中:
PSSM是parallel-split shadow maps的缩写m表示切分视锥体的数量res表示每个shadow map的分辨率
PSSM(m, res)的具体方案如下图所示:
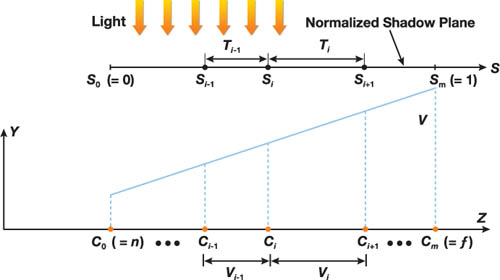
我们将遵循下面这几个步骤:
- 根据在${C_i}$处的平面,将视锥体$V$分割为$m$个子视锥体,记作${V_i}$
- 为每个子视锥体${V_i}$计算出光源的view-proje变换矩阵
- 为每个子视锥体${V_i}$生成分辨率为
res的shadow map - 完成shadow mapping计算
Step 1: Splitting the View Frustum
首先,我们需要判断split plane的放置位置。在这里,我们有必要简单回顾一下shadow mapping中的锯齿产生的原因。如下图所示,$ds$表示shadow map的纹素大小,$dp$表示物体在屏幕投影的长度,我们可得:
\[\frac{dp}{ds}=n\frac{dz}{zds}\frac{cos\phi}{cos\theta}\]我们希望$\frac{dp}{ds}$作为shadow map aliasing error能够保持不变,从而使得不同深度的物体的每个像素在shadow map上的覆盖区域保持不变,也就是锯齿在场景不同深度下保持恒定。
| [Cascaded Shadow Maps - Win32 apps | Microsoft Learn](https://learn.microsoft.com/en-us/windows/win32/dxtecharts/cascaded-shadow-maps) |
本文由作者按照 CC BY 4.0 进行授权