The Pinhole Camera Model
在上一篇博客中,我们大致了解了三角形顶点从世界空间变换到像素坐标的过程。这一篇博客是更进一步的拓展,我们将会研究基于物理的针孔相机模型在顶点坐标变换中的影响。
我们先来看看针孔相机的原理。
How a Pinhole Camera Works
在相机中,胶片的尺寸与光圈到image plane的距离对相机的成像有着至关重要的作用。在本篇博客中,我们将会讨论这两个因素对于图像质量的影响,并且会整合到我们的虚拟相机模型中。
Focal Length, Angle of View, and Filed of View
在相机模型中,我们将场景投影图像所在的平面称为image plane,当image plane靠近光圈时,物体会变得更小,场景中有更多的部分会被投影,我们用属于Zooming Out来描述这个过程。相反地,当image plane远离光圈时,场景中被投影的部分会变少,我们称之为Zooming In。我们可以用两种方式分别量化这个过程:
- 调整焦距,也就是image plane与光圈之间的距离。
- 调整FOV,也就是由光圈和胶片两侧边缘定义的三角形的角度。FOV有水平和竖直之分。
- 不同的程序或API所使用FOV也不同,如OpenGL使用的是竖直FOV,而Maya使用的是水平FOV
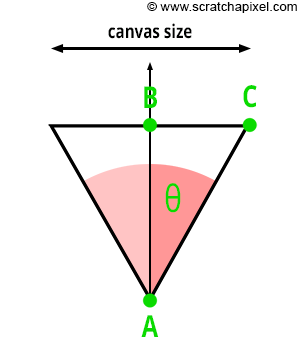
此外,如上图所示,我们可以看到,焦距与FOV之间有着直接的联系:当canvas尺寸固定时,焦距越大,FOV越小。
Film Size Matters Too
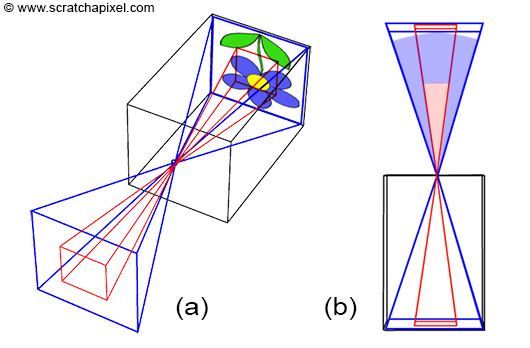
如上图所示,我们所捕获的场景的范围也会受到传感器尺寸的影响。传感器的尺寸越大,所捕获的场景的范围就越大。因此,胶片的尺寸与相机的FOV之前也存在着一定的关系:尺寸越小,FOV就越小。
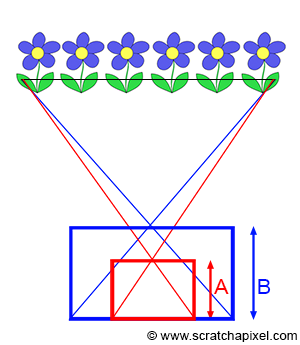
需要注意的是,有时我们可能会误解胶片尺寸与图像质量这二者的联系。当然,二者是有关联的,胶片的尺寸越大,理论上就能记录更多的细节,图像的质量就越高。但是,如果我们想要使用不同尺寸的胶片来拍摄相同的场景图片,就需要对应的调整焦距的大小,如下图所示中的A和B,分别代表了不同尺寸的胶片所使用的焦距:
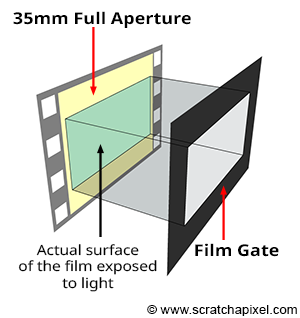
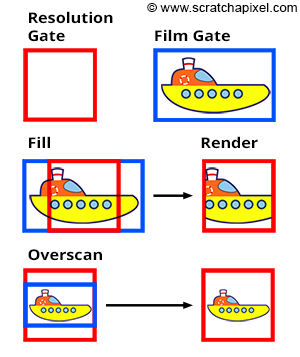
Film Gate这个术语指的是胶片前的矩形开口,它是可以自由调整的,从而可以允许我们修改胶片的格式。当然,对于数码相机来说,film gate通常表示的是胶片的宽高比。下图展示了film gate的作用机制:
此外,还有一个与film gate类似的概念,称为film back,它是相机中的一个结构,用于支撑和固定胶片。在Maya中,镜头相关的参数就被整合进了Film Back这个类中。改变Film Gate参数,就可以修改胶片的预设格式,进而改变Camera Aperture这个参数,该参数分别定义了胶片的宽和高。而参数Film Aspect Ratio则定义了胶片的宽高比。

这个地方我很想吐槽,原谅我水平有限,但是为什么胶片的参数要命名为Camera Aperture,这个参数不是只光圈吗???
现在,我们已经介绍了相机的焦距、FOV与胶片尺寸,我们需要明白:焦距和胶片尺寸是真实相机中我们可以调节的参数,而FOV是根据焦距和叫胶片尺寸计算而来。想要模拟真实的物理相机模型,我们需要考虑的就是焦距和胶片尺寸这两个参数。
Image Resolution and Frame Aspect Ratio
胶片的尺寸通常以英寸或毫米为单位,我们不应该将胶片的尺寸和图像的像素数量混淆。我们可以这样理解,胶片的尺寸会影响FOV,但是图像的分辨率却不会。这两个参数是完全无关的。
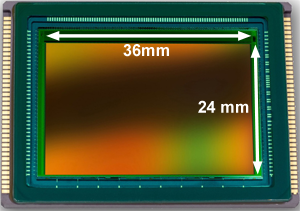
在数码相机中,传感器取代了胶片,我们可以将传感器的尺寸理解为等同于胶片的尺寸,但与胶片相比,传感器还多了一个属性,也就是包含的像素数量。下图是一个徕卡数码相机的传感器,它的尺寸为36mm x 24mm,分辨率是6000 x 4000,以像素为单位:
虽然说传感器自身包含了像素,但需要注意的是,像素数量仍然与FOV无关,像素分辨率仅仅会影响图片的清晰度。
而在CG中,这个理念是类似的,宽高比相同,但分辨率不同的若干图片可以描绘同一个场景,更高的分辨率可以提供更多的细节。我们可以将图像也类比为gate这样一个概念,称为resolution gate。我们会在稍微讨论resolution gate与film gate的区别以及二者之间的联系。
现在,我们可以定义出image/device aspect ratio这个概念了,它通过图像的分辨率计算而来。常见的宽高比有4:3、16:9、21:9等。
Canvas Size and Image Resolution: Mind the Aspect Ratio!
与胶片相机相比,数码相机有一个独有的特性,那就是传感器(或者说canvas,也就是绘制了三维场景的二位表面)的宽高比和图片的宽高比可以不一致。你可能会好奇,为什么要有这样的设定?
实际上,这种情况比预期中更常见。比如说,胶片帧(也就是胶片所记录的单帧静态图片)在扫描时所用的门(代表了一种宽高比)很可能与拍摄时用的门不同,这样自然会导致宽高比的不一致。这种情况在处理变形格式(如宽银幕电影)时也会出现。
在我们深入了解变形格式anamorphic之前,我们先来考虑一下这种不一致性在光栅化中的情况。假设我们有一个正方形的canvas,它的两个极值点的坐标分别是(-1, -1)和(1, 1) ,并且上面有一个圆形的图像,如下图所示:
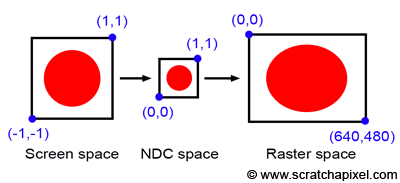
在光栅化算法中,从屏幕空间变换到NDC空间,需要将范围映射到[0, 1]上,但因为canvas本身就是正方形的,所以宽高比得以保留,图像也不会在某个方向上被拉伸或压缩。然而,如果最终图像的分辨率是640 x 480,在映射到栅格空间的过程中,宽高比会被映射为4:3,导致我们的圆球被拉伸了。我们可以得出这样一个结论:如果栅格图像的宽高比与canvas的宽高比不一致,将会导致图片失真。
你可能回想,为什么这种差异会发生。但实际上,这种失真的情况只是我们的推理与假设,在我们最终的相机模型中,canvas宽高比会由图像的宽高比计算而来。例如,如果图像的分辨率设置为640 x 480,那么canvas宽高比就会设置为4:3。
但如果,根据胶片尺寸film size(Maya中称为Film Aperture???不理解,尊重祝福)计算canvas宽高比,而非图片分辨率的话,则以不同纵横比的分辨率渲染图像可能会导致不匹配。例如,35 毫米胶片格式(学院尺寸)的尺寸为 22 毫米 x 16 毫米,长宽比为 1.375。然而,对完整 35 毫米胶片帧进行标准 2K 扫描会产生 1.31 的设备纵横比,从而导致画布和设备纵横比不同。
为了解决这个问题,DCC、游戏引擎等软件会提供将canvas宽高比与图像宽高比(或称设备宽高比)对齐的策略:
- Fill模式会强制resolution gate置于film gate内
- Overscan模式会强制film gate置于resolution gate内
两种模式的对比如下图所示:
Conclusion and Summary
如果我们想要模拟真实相机,我们需要根据焦距与胶片尺寸来计算FOV。
Implementing a Virtual Pinhole Camera
我们会在代码中构建一个虚拟针孔相机模型,它具备以下参数:
核心参数,需要我们自行为相机设定:
- 焦距 Type: float
- 相机与胶片/传感器的距离
- 可以说,焦距的用途非常单一,仅仅用于计算FOV
- 单位是毫米mm
- 胶片尺寸 Type: 2 floats
- 与焦距共同计算出相机FOV。
- 定义了相机film gate宽高比
- 通常以英尺inch为单位,不过我选择用mm
- 裁截面 Type: 2 floats
- 远近裁截面是一组与相机Z轴垂直,与canvas所在的image plane平行的平面。
- 组成了视锥体,定义了场景中相机的可视范围。
- 相机与近裁截面的距离与焦距是完全无关的概念,不要混淆。
- *(与相机模型无关)定义了深度值的范围,与深度值精度高度相关。*
- 我们通常都会假定image plane在近裁截面上,也就是相机会在近裁截面上成像。这样的设定可以精简投影方程
- 在这种情况下,Znear就表示相机与canvas之间的距离
- 图像大小 Type: 2 integers
- 渲染图像的尺寸,以像素数为单位
- 定义了resolution gate宽高比。
- Gate Fit Type: enum
- 提供了当胶片尺寸宽高比与图像分辨率宽高比不同时的处理渲染,换种说法的话,也就是判断film gate与resolution gate要如何适配。
- 由Fill和Overscan两种选项。
- Camer to World Type: 4x4 matrix
- 定义相机的位置与视线方向
有了以上参数,我们就可以计算出下列参数:
- FOV Type: float
- 代表了相机捕获场景的视觉范围
- 由焦距和胶片尺寸计算而来
- Canvas/Screen Window Type: 4 floats
- 表示canvas范围的四个坐标值,用与判断投影点是否可见
- 由canvas尺寸计算而来。
- Film Gate Aspect Raio Type: float
- 决定了相机捕获的图像的形状
- 胶片宽度除以胶片高度即可得
- Resolution Gate Aspect Raio Type: float
- 最终渲染的图片的宽高比,影响了NDC空间到栅格空间的变换
- 图片横向像素数除以图片纵向像素数
Computing the Canvas Coordinates
我们的思路很清晰:
通过焦距和胶片尺寸先计算出水平或竖直任意方向上的FOV
根据FOV和近裁截面与相机之间的距离Znear计算canvas尺寸
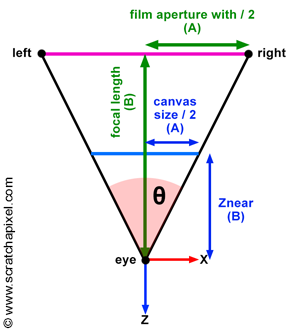
我们以水平方向为例,首先计算FOV:
\[\tan({\theta_V \over 2}) = {A \over B} = {\dfrac {\dfrac { \text{Film Aperture Height} } { 2 } } { \text{Focal Length} }}.\]然后,根据相似三角形,我们可以表示出canvas的高度:
\[\begin{array}{l} \tan(\dfrac{\theta_V}{2}) = \dfrac{A}{B} = \dfrac{\dfrac{\text{Canvas Height} } { 2 } } { Z_{near} }, \\ \dfrac{\text{Canvas Height} } { 2 } = \tan(\dfrac{\theta_V}{2}) \times Z_{near},\\ \text{Canvas Height}= 2 \times {\tan(\dfrac{\theta_V}{2})} \times Z_{near}. \end{array}\]将$\tan\left(\dfrac{\theta_V}{2}\right)$代入,可得:
\[\begin{array}{l} \text{Canvas Height}= 2 \times {\dfrac {\dfrac { \text{Film Aperture Height} } { 2 } } { \text{Focal Length} }} \times Z_{near}. \end{array}\]计算canvas高度,实际上最终还是为了计算canvas的范围,我们可以得到表示canvas的上边界的Y值为:
\[\text{top} = {\dfrac {\dfrac { \text{Film Aperture Height} } { 2 } } { \text{Focal Length} }} \times Z_{near}\]我们知道,canvas具有和胶片尺寸相同的宽高比,所以我们可以直接求出水平方向上的坐标值:
\[\text{right} = \dfrac {\dfrac { \text{Film Aperture Height} } { 2 } } { \text{Focal Length} } \times Z_{near} \times \dfrac{\text{Film Aperture Width}}{\text{Film Aperture Height}}\]进一步简化,可得:
\[\text{right} = \dfrac {\dfrac { \text{Film Aperture Width} } { 2 } } { \text{Focal Length} } \times Z_{near}\]我们通过代码来表述以上的计算过程:
1
2
3
4
5
6
7
8
9
10
11
12
13
int main(int argc, char **argv)
{
float top = (filmApertureHeight / 2) / focalLength) * nearClippingPlane;
float bottom = -top;
float filmAspectRatio = filmApertureWidth / filmApertureHeight;
float right = top * filmAspectRatio;
// or
float right = (filmApertureWidth / 2) / focalLength) * nearClippingPlane;
float left = -right;
printf("Screen window bottom-left, top-right coordinates %f %f %f %f\n", bottom, left, top, right);
...
}
Rewrite Projection Function
现在,由于我们重新设定了canvas距离相机的距离,以及通过相机参数而计算canvas的尺寸,我们需要对计算像素坐标的函数有所调整:
- 此前,我们假设canvas距离相机一个单位长度的距离,而现在,canvas位于近裁截面上,即$\frac{P.y}{P.z}=\frac{P’.y}{Znear}$.我们需要在透视除法中乘以Znear
- 此前,我们使用的是硬编码的canvas尺寸,是直接在代码中进行定义,但现在我们需要根据相机的参数计算得到canvas的四个范围值,对应的参数需要调整
- 当判断像素坐标是否超出canvas范围时,我们可以使用计算好的canvas的四个范围值。
修改后的函数如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
bool computePixelCoordinates(
const Vec3f &pWorld,
const Matrix44f &worldToCamera,
const float &b,
const float &l,
const float &t,
const float &r,
const float &near,
const uint32_t &imageWidth,
const uint32_t &imageHeight,
Vec2i &pRaster)
{
Vec3f pCamera;
worldToCamera.multVecMatrix(pWorld, pCamera);
Vec2f pScreen;
pScreen.x = pCamera.x / -pCamera.z * near;
pScreen.y = pCamera.y / -pCamera.z * near;
Vec2f pNDC;
pNDC.x = (pScreen.x + r) / (2 * r);
pNDC.y = (pScreen.y + t) / (2 * t);
pRaster.x = static_cast<int>(pNDC.x * imageWidth);
pRaster.y = static_cast<int>((1 - pNDC.y) * imageHeight);
bool visible = true;
if (pScreen.x < l || pScreen.x > r || pScreen.y < b || pScreen.y > t)
visible = false;
return visible;
}
When Resolution Gate and Film Gate Ratios Don’t Match
如果我们放任图像宽高比和胶片宽高比不一致,那么由胶片宽高比计算得到canvas宽高比就无法在栅格空间的变换中保留,最终会导致图片失真。所以我们在Fill模式和Overscan模式中选择一个,做出正确的处理。
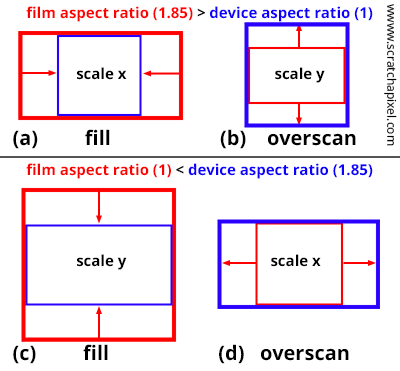
这两种模式其中也好区分:
- Fill模式意味着缩小canvas:
- 在Film Gate大于Resolution Gate时,会将canvas的水平坐标缩小,也就是乘以Resolution Gate / Film Gate
- 在Resolution Gate大于Film Gate,会将canvas的竖直坐标缩小,也就是乘以Film Gate / Resolution Gate
- Overscan模式意味着放大canvas:
- 在Film Gate大于Resolution Gate时,会将canvas的竖直坐标放大,也就是乘以Film Gate / Resolution Gate
- 在Resolution Gate大于Film Gate,会将canvas的竖水平坐标放大,也就是乘以Resolution Gate / Film Gate
代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
float xscale = 1;
float yscale = 1;
switch (fitFilm) {
default:
case kFill:
if (filmAspectRatio > deviceAspectRatio) {
// Case 8a
xscale = deviceAspectRatio / filmAspectRatio;
} else {
// Case 8c
yscale = filmAspectRatio / deviceAspectRatio;
}
break;
case kOverscan:
if (filmAspectRatio > deviceAspectRatio) {
// Case 8b
yscale = filmAspectRatio / deviceAspectRatio;
} else {
// Case 8d
xscale = deviceAspectRatio / filmAspectRatio;
}
break;
}
right *= xscale;
top *= yscale;
left = -right;
bottom = -top;
需要注意的是,不管是哪种模式,每次都只会处理canvas的一个方向的范围,所以我们需要在计算前设置大小为1的缩放值,也就是:
1
2
float xscale = 1;
float yscale = 1;