Bounding Volume Hierarchies
本章节将会是光线追踪系列博客中目前为止最难且最复杂的部分,我们之所以在当前的进度下引入BVH,一方面是为了让代码运行更快,同时也是因为实现BVH要求我们重构hittable类的部分代码,当我们在场景中添加长方体等其他物体时,我们就不再需要再回过头考虑hittable的重构了。
当前我们的渲染器的主要时间瓶颈在光线-物体的相交测试上,当我们向场景中发射数以百万计的光线时,我们可以首先对场景中的物体进行排序,这里的排序主要使用两种方法:细分空间、细分对象。后者通常更容易通过代码实现,在大多数模型上运行速度也一样快。
最终,我们将通过BVH将渲染器的复杂度从线性优化为次线性sublinear,也就是O(log n)。
3.1 The Key Idea
为一组primitive创建bounding volume的关键点在于,找到一个可以完全包围所有物体的volume。假设,我们计算出了一个能够完全包围十个物体的球体,那么我们可以得出这样的结论:任何无法与该球体相交的光线,都不可能与球体所包围的物体相交。我们可以用一段伪代码来说明这个结论:
1
2
3
4
if (ray hits bounding object)
return whether ray hits bounded objects
else
return false
3.2 Hierachies of Bounding Volumes
为了实现次线性的复杂度,我们需要为bounding volumes构建层级。例如说,如果我们将物体分为红色与蓝色的两组,然后使用矩形的bounding volume,则我们得到的结果如下所示:
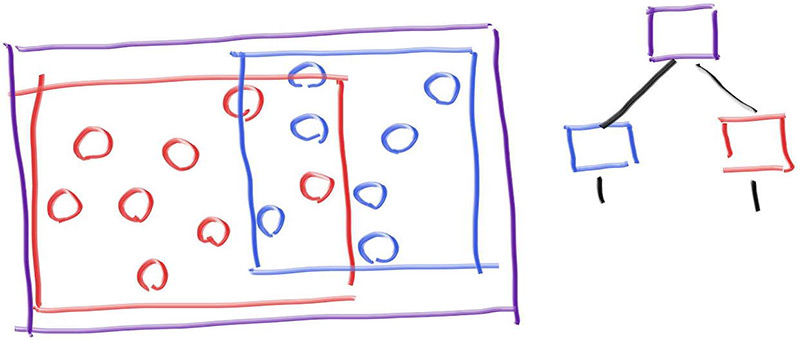
从图中我们可以看出,红色与蓝色两个组都属于紫色bounding volume的一部分,且两个volume可以发生重叠,并且它们之间没有次序之分,我们只会使用左右来区分它们。用伪代码的形式表示:
1
2
3
4
5
6
if (hits purple)
hit0 = hits blue enclosed objects
hit1 = hits red enclosed objects
if (hit0 or hit1)
return true and info of closer hit
return false
3.3 Axis-Aligned Bounding Boxes(AABBs)
在BVH中,光线与物体进行相交测试之前,会首先与bounding volume进行相交测试,在众多的volume模型中,AABB的相交测试的性能优势更为明显,同时也可以更好地实现对物体的划分。
值得一提的是,在光线与bounding volume的相交测试中,我们只需要判断是否相交会发生,并不需要再获取任何额外的信息。
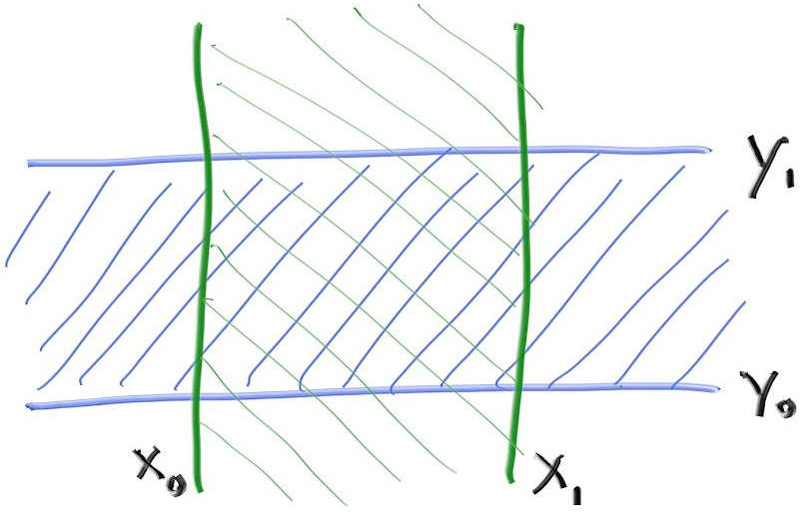
我们使用slab的方法来进行AABBs的相交测试。我们以2D空间中的AABB(也就是一个矩形)为例来说明这个方法。从区间的角度来考虑,一个矩形可以通过两组区间来表示,如下图所示,绿色与蓝色所代表的两个范围共同构成了这样一个矩形:
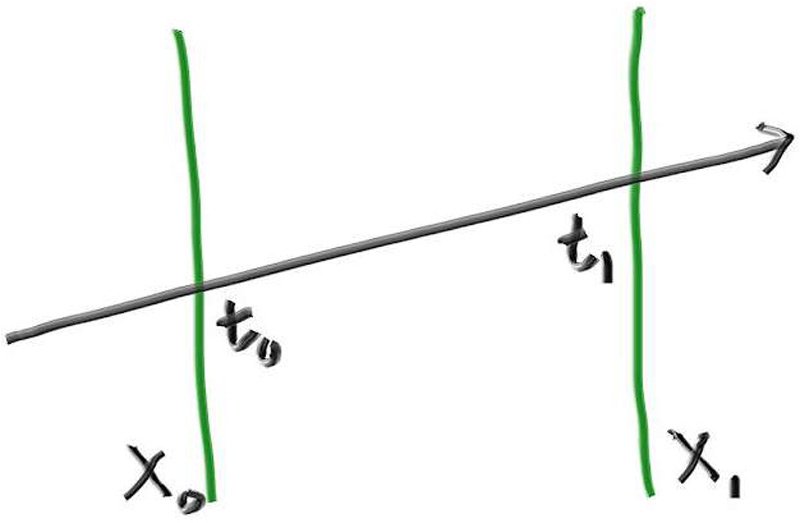
如果一个光线能够与某个区间相交,则该光线必定与区间的边界相交。如下图所示,光线与x0和x1这两个区间的边界相交,会分别返回t0与t1:
我们再次回到三维空间中思考问题,那么x0和x1所表示的就是三维空间中的平面。我们如何判断光线是否与平面相交呢?实际上还是利用光线与平面的参数方程所构造的等式,我们首先回顾光线的参数方程:
\[\mathbf{P}(t) = \mathbf{Q} + t \mathbf{d}\]这个等式对于xyz三个分量都是成立的,我们不妨以x坐标值为例,当光线与x0所代表的平面相交时,我们有:
\[x_0 = Q_x + t_0 d_x\]其中t0是等式中的未知数,即:
\[t_0 = \frac{x_0 - Q_x}{d_x}\]同样的,我们可得:
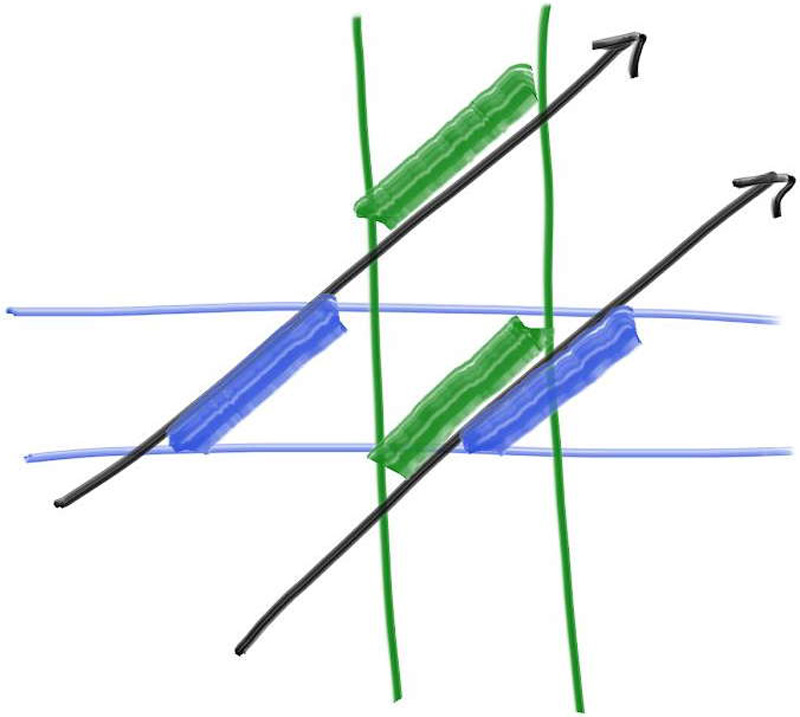
\[t_1 = \frac{x_1 - Q_x}{d_x}\]当我们为每个区间计算出t0与t1时,我们就可以利用slab方法中的核心技巧了:只有当光线与bounding box相交时,构成bounding box的所有区间所对应的[t0, t1]才会发生重叠。如下图中更下方的射线所示:
3.4 Ray Intersection with an AABB
我们将前面所提到的实现思路用下面的伪代码表示:
1
2
3
4
intervalX <- computeIntersectionX(ray, x0, x1);
intervalY <- computeIntersectionX(ray, y0, y1);
intervalZ <- computeIntersectionX(ray, z0, z1);
return overlaps(intervalX, intervalY, intervalZ);
只是我们还需要考虑到光线的行进方向,还是以X轴为例,如果光线朝着-X的方向前进,则我们会得到t0,>t1,所以我们还需要进行如下判断(对所有轴向上的分量均成立):
\[\displaylines{t_{x0} = \min( \frac{x_0 - Q_x}{d_x}, \frac{x_1 - Q_x}{d_x})\\t_{x1} = \max( \frac{x_0 - Q_x}{d_x}, \frac{x_1 - Q_x}{d_x})}\]接下来,我们再来看看伪代码中overlaps()函数的实现:
1
2
3
4
bool overlaps(tInterval1, tInterval2)
tMin <- max(tInterval1.min, tInterval2.min)
tMax <- min(tInterval1.max, tInterval2.max)
return tMin < tMax
现在有了清晰的思路,我们就可以动手为我们的渲染器实现BVH了。
首先需要做的是实现一个AABB的类,按照前面的内容,我们可以将AABB视为由三个轴向上的三个区间围成的一个box。此外,AABB类还需要一个hit()函数,用于判断AABB是否会与给定光线发生相交。下面是AABB类的代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
#ifndef AABB_H
#define AABB_H
#include <queue>
#include "rayTracing.h"
class aabb
{
public:
interval x, y, z;
aabb() = default; // aabb is empty by default
aabb(const interval& x, const interval& y, const interval& z)
: x(x), y(y), z(z) {}
aabb(const point3& a, const point3& b)
{
// here we treat a and b as extrema for the bounding box, and we sort them manually
// thus we just dont require them to be particular minimum-maximum order
x = a[0] <= b[0] ? interval(a[0], b[0]) : interval(b[0], a[0]);
y = a[1] <= b[1] ? interval(a[1], b[1]) : interval(b[1], a[1]);
z = a[2] <= b[2] ? interval(a[2], b[2]) : interval(b[2], a[2]);
}
const interval& getIntervalOfAxis(int n) const
{
if (n == 1) return y;
if (n == 2) return z;
return x;
}
bool hit(const ray& rayIncoming, interval t) const
{
const point3& origin = rayIncoming.origin();
const vec3& direction = rayIncoming.direction();
for (int axis = 0; axis < 3; axis++)
{
// 1. calculate t0 and t1 for the intersection of incoming ray and certain interval of AABB
const interval& axisInterval = getIntervalOfAxis(axis);
const double divisor = 1.0 / direction[axis];
double t0 = (axisInterval.min - origin[axis]) * divisor;
double t1 = (axisInterval.max - origin[axis]) * divisor;
// 2. make sure t0 < t1
if (t0 >= t1) std::swap(t0, t1);
// 3. do the overlap test
// for AABB, there are three [t0, t1] intervals
// we name the maximum t0 of the intervals as tMin,
// and the minimum t1 of the interval as tMax
if (t0 > t.min) t.min = t0;
if (t1 < t.max) t.max = t1;
// 4. if tMin > tMax, then ray will hit AABB
if (t.max <= t.min) return false;
}
return true;
}
};
#endif
3.5 Constructing Bounding Boxes for Hittables
BVH的核心在于,为场景中所有物体的AABB构建一个层级,每个单一的hittable对象都属于这个层级中的一个子节点,或者说是BVH这棵大树的叶子。
由于我们的BVH采用的是划分物体的方法,所以场景中每一个hittable对象都需要一个AABB,为此,我们需要给hittable类的派生类添加新的成员变量,并且在sphere类的构造函数中计算AABB:
1
2
3
4
5
6
7
class sphere final : public hittable
{
...
private:
...
aabb bbox;
}
由于光线追踪器已经引入了运动模糊的特性,静态球体与动态球体计算AABB的方式略有不同,前者只需要根据球体的球心位置与半径计算即可,而后者我们则需要先分别计算出球体在time=0和time=1时的AABB,再根据这两个AABB计算出一个可以包围这两个AABB的AABB。听起来我们需要一个新的AABB构造函数了。
由于AABB是由三个轴上的区间构成的,所以新的AABB构造函数同样需要一个新的interval构造函数,该构造函数会根据输入的两个区间输出一个包含两个区间的新区间:
1
2
3
4
5
6
interval(const interval& a, const interval& b)
{
// create the interval tightly enclosing the two input intervals
min = a.min <= b.min ? a.min : b.min;
max = a.max >= b.max ? a.max : b.max;
}
然后是新的AABB构造函数:
1
2
3
4
5
6
aabb(const aabb& a, const aabb& b)
{
x = interval(a.x, b.x);
y = interval(a.y, b.y);
z = interval(a.z, b.z);
}
现在我们继续在sphere类的构造函数中计算球体的AABB:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
// stationary sphere
sphere(const point3& center, double radius, const shared_ptr<material>& material)
: initialCenter(center), radius(fmax(0, radius)), material(material), isMoving(false)
{
vec3 radiusVec3 = vec3(radius, radius, radius);
bbox = aabb(initialCenter - radiusVec3, initialCenter + radiusVec3);
}
// moving sphere
sphere(const point3& initialCenter, const point3& finalCenter, double radius, const shared_ptr<material>& material)
: initialCenter(initialCenter), radius(fmax(0, radius)), material(material), isMoving(true)
{
vec3 radiusVec3 = vec3(radius, radius, radius);
aabb initialAABB = aabb(initialCenter - radiusVec3, initialCenter + radiusVec3);
aabb finalAABB = aabb(finalCenter - radiusVec3, finalCenter + radiusVec3);
bbox = aabb(initialAABB, finalAABB);
centerVector = finalCenter - initialCenter;
}
最后,为了能够使用hittable对象的AABB,我们在hittable类中新增一个虚函数boundingBox():
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
...
#include "aabb.h"
class material;
...
class hittable
{
public:
virtual ~hittable() = default;
virtual bool hit(const ray& r, interval tInterval, hitInfo& info) const = 0;
virtual aabb boundingBox() const = 0;
};
sphere类的中的boundingBox()只需要返回成员变量bbox即可:
1
2
3
4
5
6
7
8
9
10
11
12
class sphere final : public hittable
{
...
aabb boundingBox() const override {return bbox;}
private:
...
aabb bbox;
...
};
3.6 Creating Bounding Boxed of Lists of Objects
由于hittable类新增了boundingBox()函数,我们同样更新hittableList类。由于BVH是一个层级结构,场景中的hittableList对象将作为这个结构的根节点,同样具有一个AABB,且场景中每增加一个hittable对象,hittableList的AABB都会根据新增的hittable的AABB进行范围上的扩展。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
#include "aabb.h"
#include "hittable.h"
#include <vector>
class hittableList final : public hittable
{
public:
...
void add(const shared_ptr<hittable>& object)
{
objects.push_back(object);
bbox = aabb(bbox, object->boundingBox());
}
..
aabb boundingBox() const override { return bbox; }
private:
aabb bbox;
};
3.7 The BVH Node Class
BVH在我们的C++工程里同样派生自hittable类,并且在我们的代码设计中,bvh类可以同时包含根节点与子节点:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
#ifndef BVH_H
#define BVH_H
#include "rayTracing.h"
#include "aabb.h"
#include "hittable.h"
#include "hittableList.h"
class bvhNode final : public hittable
{
public:
bvhNode(hittableList list) : bvhNode(list.objects, 0, list.objects.size())
{
// There's a C++ subtlety here. This constructor (without span indices) creates an
// implicit copy of the hittable list, which we will modify. The lifetime of the copied
// list only extends until this constructor exits. That's OK, because we only need to
// persist the resulting bounding volume hierarchy.
}
bvhNode(std::vector<shared_ptr<hittable>>& objects, size_t start, size_t end)
{
// To be implemented later
}
bool hit(const ray& r, interval tInterval, hitInfo& info) const override
{
if (!bbox.hit(r, tInterval)) return false;
bool hitLeft = left->hit(r, tInterval, info);
bool hitRight = right->hit(r, interval(tInterval.min, hitLeft ? info.t : tInterval.max), info);
return hitLeft || hitRight;
}
aabb boundingBox() const override {return bbox;}
private:
shared_ptr<hittable> left;
shared_ptr<hittable> right;
aabb bbox;
};
#endif
3.8 Splitting BVH Volumes
在BVH加速结构中,最复杂的部分就是构建BVH,现在让我们在bvh类的构造函数中完成这项任务。在BVH中,我们需要找到一个尽可能合理的递归划分策略,所以我们的思路是:
- 随机选择一个轴向
- 使用
std::sort对物体进行排序 - 将排序后的物体分为两个subtree,每个subtree各包含一半的物体
由于构建BVH的过程是递归的,且涉及到划分,我们需要考虑到一些特殊的情况。当传入的hittableList只有两个元素时,我们直接在两个subtree中各放一个元素然后结束递归。代码中所使用的算法应该尽可能保证平滑进行,所以我们需要避免对null指针的检查,因此,若hittableList中只有一个元素,我们就为每个subtree复制一个元素。
当然,在构建BVH时,如果我们能够显式地检查到hittableList中只包含三个元素(也就是场景中只有三个物体),我们只进行一次递归调用就可以了。只是对于这种特殊情况的优化我们可以放在后面进行。
随机选择轴向的功能需要我们添加一个随机生成整数值的函数:
1
2
3
4
5
inline int randomInt(int min, int max)
{
// returns a random integer in [min, max]
return static_cast<int>(randomDouble(min, max + 1));
}
下面是用于构建BVH的构造函数,其中boxCompareX、boxCompareY、boxCompareZ我们还没有定义:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
bvhNode(std::vector<shared_ptr<hittable>>& objects, size_t start, size_t end)
{
int axis = randomInt(0, 2);
auto comparator = axis == 0 ? boxCompareX
: axis == 1 ? boxCompareY
: boxCompareZ;
size_t objectSpan = end - start;
if (objectSpan == 1)
{
left = right = objects[start];
}
else if (objectSpan == 2)
{
left = objects[start];
right = objects[start + 1];
}
else
{
std::sort(objects.begin() + start, objects.begin() + end, comparator);
auto middle = start + objectSpan / 2;
left = make_shared<bvhNode>(objects, start, middle);
right = make_shared<bvhNode>(objects, middle, end);
}
bbox = aabb(left->boundingBox(), right->boundingBox());
}
3.9 The Box Comparison Function
现在,我们需要定义出std::sort所使用比较函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
class bvhNode final : public hittable
{
...
private:
shared_ptr<hittable> left;
shared_ptr<hittable> right;
aabb bbox;
static bool boxCompare(
const shared_ptr<hittable> a, const shared_ptr<hittable> b, int axisIndex)
{
interval aInterval = a->boundingBox().getIntervalOfAxis(axisIndex);
interval bInterval = b->boundingBox().getIntervalOfAxis(axisIndex);
return aInterval.min < bInterval.min;
}
static bool boxCompareX(const shared_ptr<hittable> a, const shared_ptr<hittable> b)
{
return boxCompare(a, b, 0);
}
static bool boxCompareY(const shared_ptr<hittable> a, const shared_ptr<hittable> b)
{
return boxCompare(a, b, 1);
}
static bool boxCompareZ(const shared_ptr<hittable> a, const shared_ptr<hittable> b)
{
return boxCompare(a, b, 2);
}
};
当我们进行到这一步,我们已经可以在场景中使用BVH来加速光线追踪的计算了:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
#include "rayTracing.h"
#include "bvh.h"
#include "camera.h"
#include "hittable.h"
#include "hittableList.h"
#include "material.h"
#include "sphere.h"
int main() {
// World-------------------------------------------------------------------------------------
hittableList world;
...
// build BVHs
world = hittableList(make_shared<bvhNode>(world));
// Render-------------------------------------------------------------------------------------
camera cam;
...
cam.render(world);
}
现在渲染超快!
3.10 Another BVH Optimization
我们可以进一步优化BVH。与其随机选择一个轴向进行BVH划分,不如直接选择AABB中最长边界所在的轴向作为划分的依据,从而能够进行更深入的划分。
我们首先为aabb类添加一些内容,包括用于返回AABB中最长边界所在轴向的函数。此外,我们再声明两个大小为空和无限大的AABB:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
class aabb
{
public:
...
int longestAxisIndex() const
{
// return the index of the longest axis of the AABB
if (x.size() > y.size())
return x.size() > z.size() ? 0 : 2;
else
return y.size() > z.size() ? 1 : 2;
}
static const aabb empty, universe;
};
const aabb aabb::empty = aabb(interval::empty, interval::empty, interval::empty);
const aabb aabb::universe = aabb(interval::universe, interval::universe, interval::universe);
当然,我们需要为interval类补充size()这个函数:
1
double size() const { return max - min; }
现在,我们回到BVH的构造函数。首先,我们先声明一个大小为空的AABB,然后将其边界扩展到可以包含所有对象的范围,最后再使用aabb::lonestAxisIndex()得到AABB中最长边界所在的轴向:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
class bvhNode final : public hittable
{
public:
...
bvhNode(std::vector<shared_ptr<hittable>>& objects, size_t start, size_t end)
{
// build thr bounding box of the span of source objects
bbox = aabb::empty; // bbox = aabb(); should work as well
for (size_t objectIndex = start; objectIndex < end; objectIndex++)
{
bbox = aabb(bbox, objects[objectIndex]->boundingBox());
}
int axis = bbox.longestAxisIndex();
...
bbox = aabb(left->boundingBox(), right->boundingBox());
}
...
};